At the heart of Xentara lies the unique Real-Time Core and Scheduler. Taking roughly ten person years to fully develop and implement, these powerful components enable users an unprecedented level of fine control over the timing of processes in both monolithic and distributed systems.
Unprecedented precision and flexibility for industrial automation
Xentara uses a highly advanced protocol to synchronize all clocks across distributed systems, ensuring perfect synchronization no matter where tasks are running.
Xentara uses a highly advanced protocol or Precision Time Protocol (PTP) to synchronize all clocks across distributed systems. This ensures that no matter which system a task is running on, it stays perfectly in sync with all others.
Triggers are the central activation element in Xentara, activated by high precision timers or configured events to activate processes.
Triggers are the central activation element in Xentara. They can be set off either cyclically by a high precision timer or by configured events (I/O, Applications, Data Point changes, system interrupts, Xentara Functions).
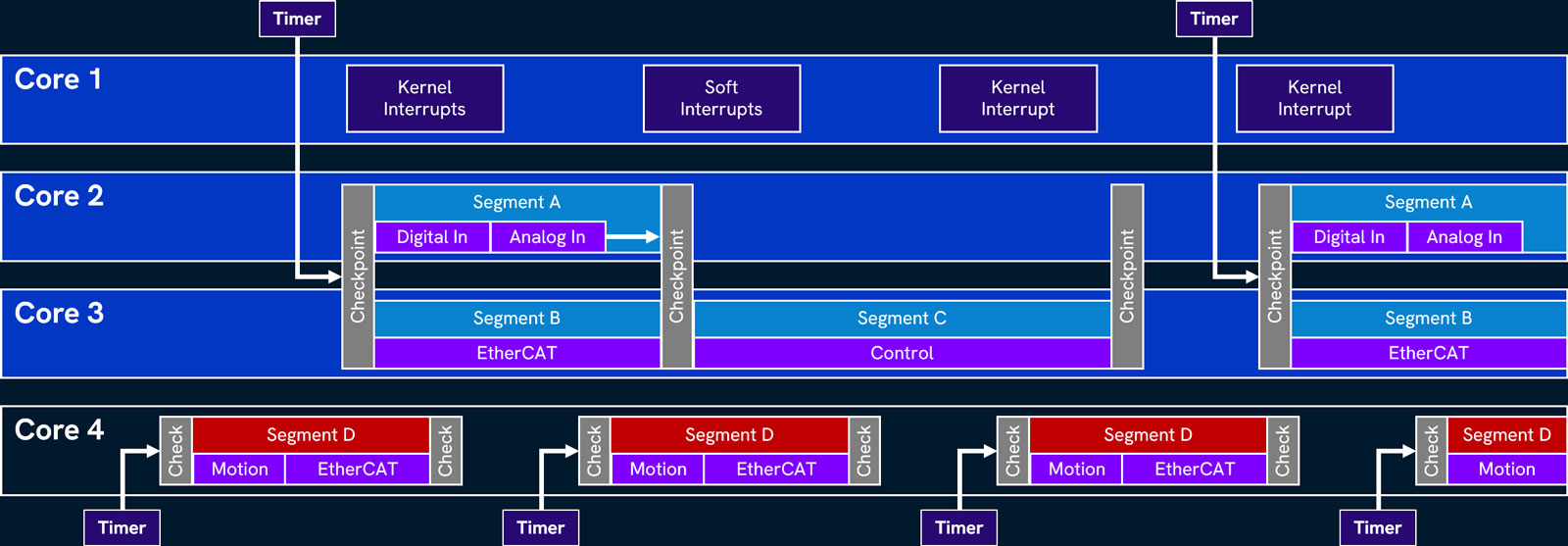
The Timing Model allows for free mixing of and interaction between real-time and non-real-time processes, resolving the OT/IT dichotomy.
While classical OT (Operations Technology) communication happens in cycles, requiring exact precision timing, IT communication (including most IoT / IIoT implementations) is almost always message or event based. Xentara resolves that dichotomy!
The Timing Model allows for free mixing of and interaction between real-time and non-real-time processes, allowing you to switch from fieldbus to machine learning to processing to movement controls to fieldbus (etc)… without changing context.
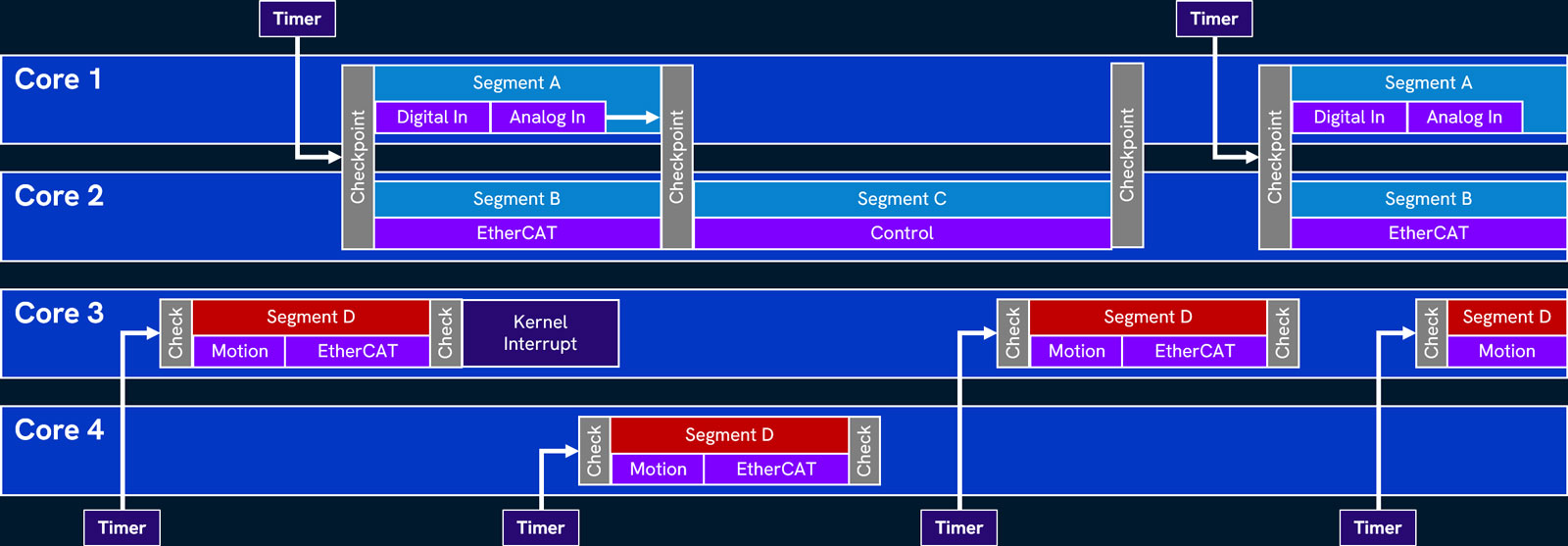
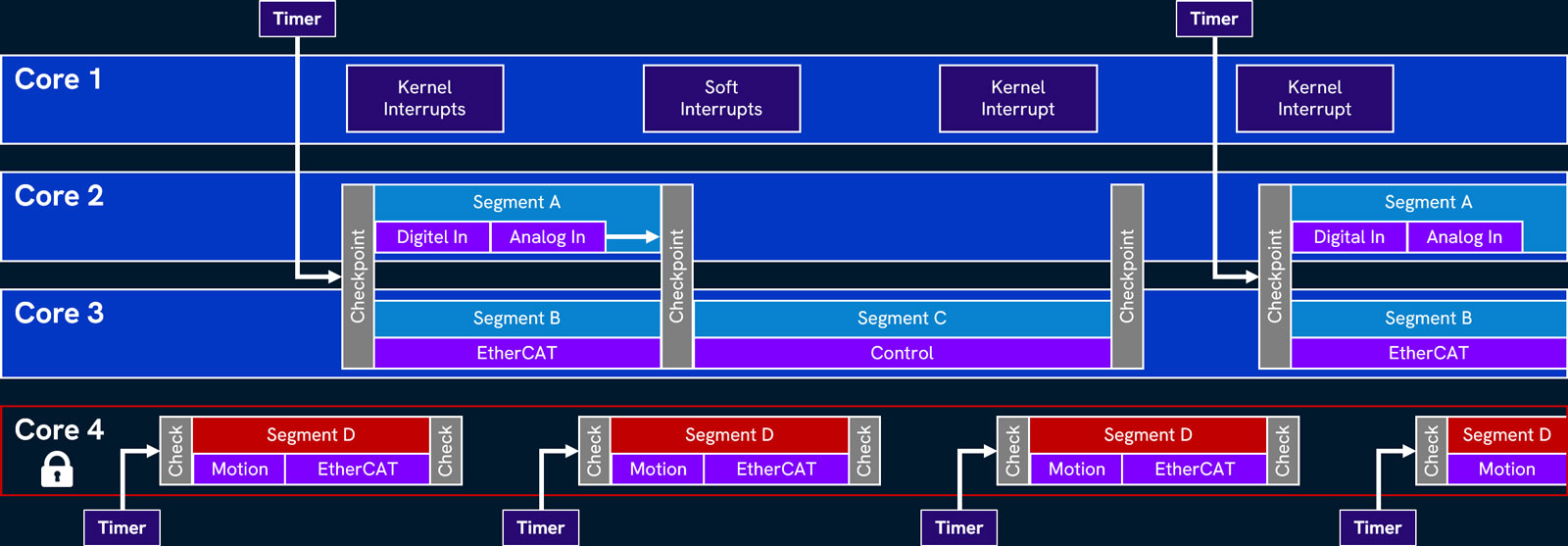
Organize processes in pipelines and tracks, launch by events or timers, run unlimited tracks sequentially or in parallel, and use checkpoints.
The Timing Model has all the building blocks you need to create any kind of schedule you can imagine.
Supports cycle speeds up to 100 kHz with cycle times as low as 10 microseconds and nanosecond accuracy for switching reactions.
The Xentara Timing Model supports cycle speeds of up to 100 kHz, allowing for cycle times as low as 10 microseconds.
To demonstrate the small resource footprint of the software, a test setup on an Intel Atom processor using only one core, controlling a motor via ethercat, with a load of 30% showed a maximum deviation of ±0.6 microseconds on a 250 microsecond cycle. Switching reactions achieved ±10 nanosecond accuracy.
The Xentara Workbench allows easy configuration of all timing elements in a graphical environment, despite the model's versatility.
The Timing Model is very versatile, making it look complex, maybe even intimidating. The Xentara Workbench allows easy configuration of all of its elements in a graphical environment.
Despite the model's complexity, configuration remains intuitive through our visual interface that abstracts the underlying technical details.
The Timing Model is very versatile, making it look complex, maybe even intimidating. The Xentara Workbench allows easy configuration of all of its elements in a graphical environment.